



Описание
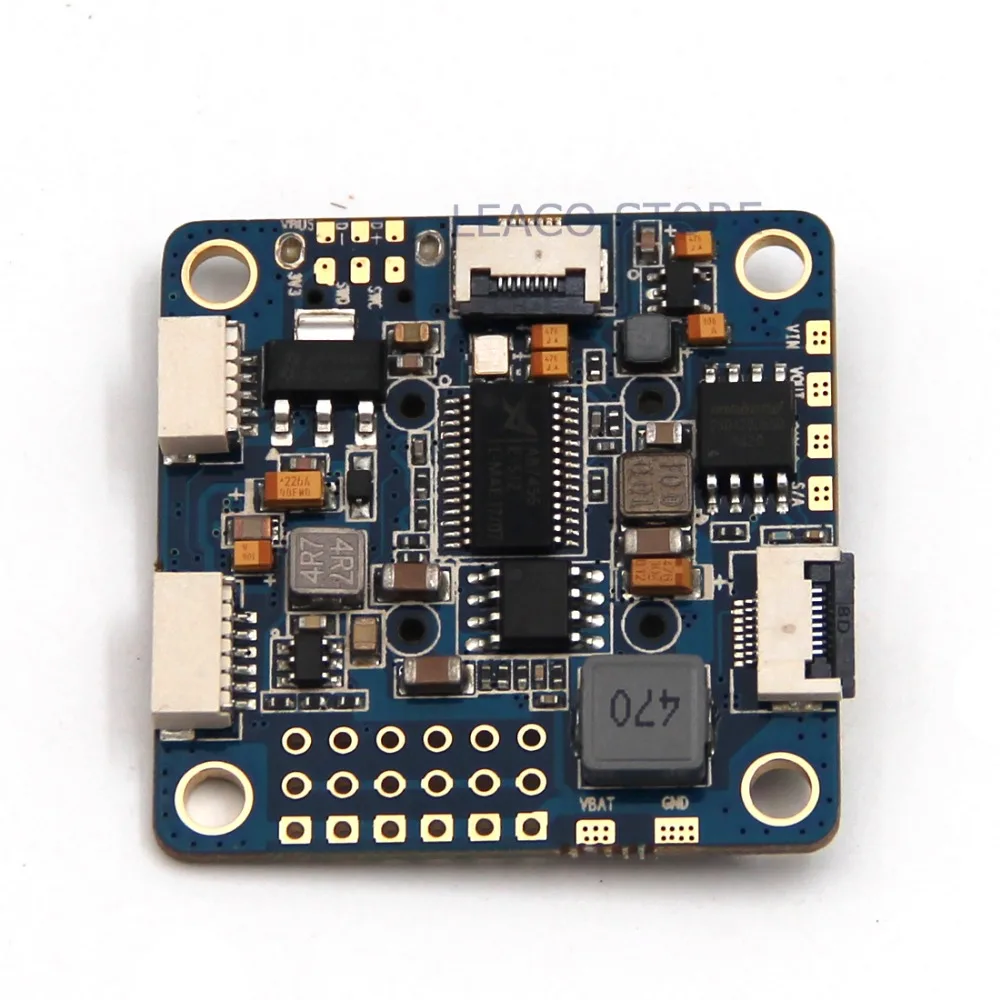
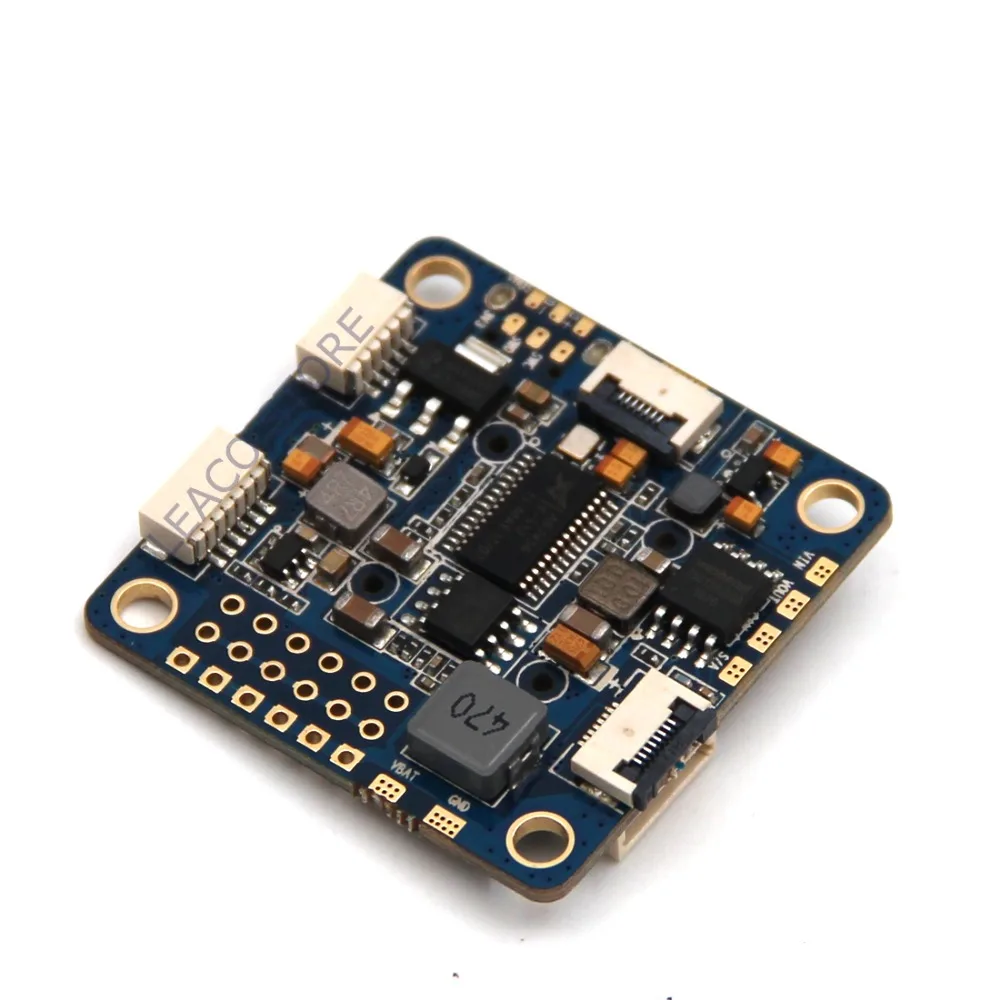
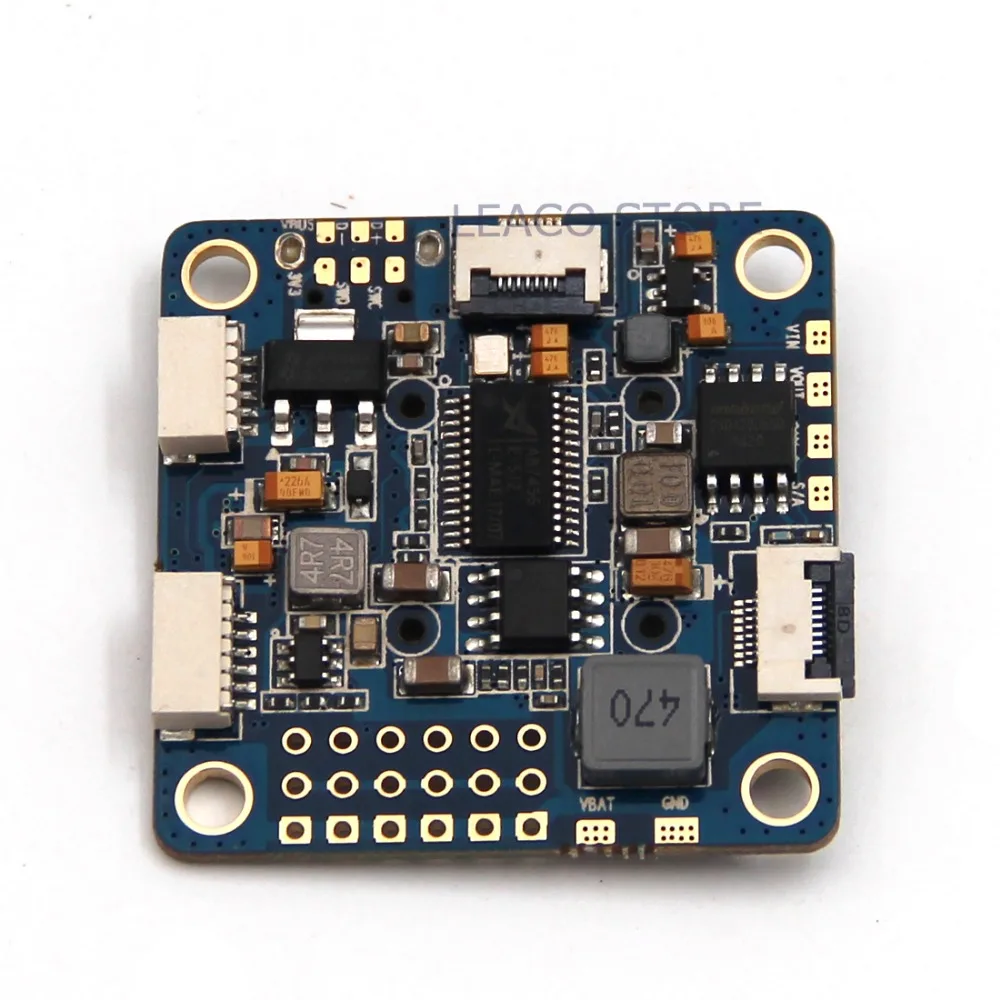
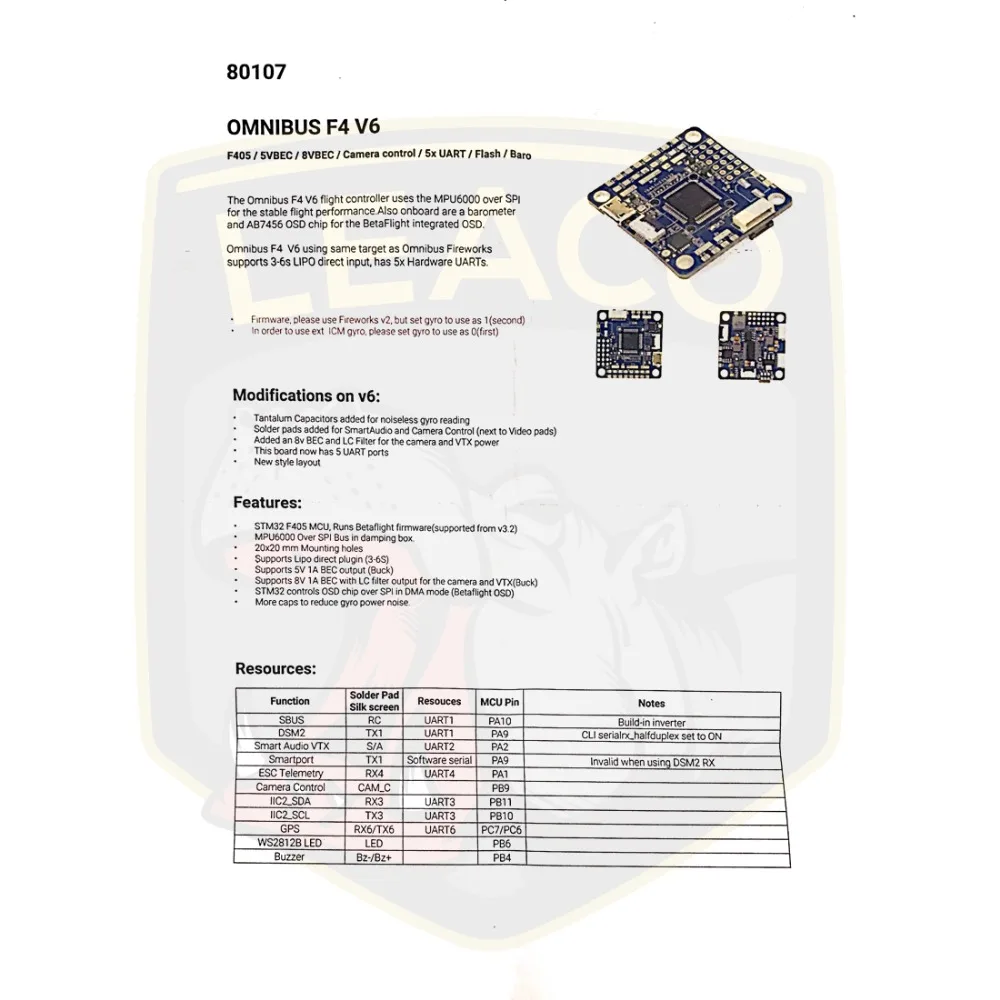
Обновленная версия OMNIBUS F4 с использованием F405 и новой цели, с5x UARTВ настоящее время.
Классический OMNIBUS дизайн, с помощью F4 MCU контролирует OSD по SPI шине, сравните первую версию, мы добавили BMP280 в качестве барометра и SD карты поддерживает.
Конфигурация OSD была вкл. В Betaflight GUI.
FCОни могут быть высланы. 5V1A BEC на плате (3-6 S) и 1x8 V BEC для камеры
MPU6000 на SPI автобус, Ext, SPI для демпфированного гироскопа
Новая версия с разъемом 8PIN Sh1.0, может быть гораздо проще подключить к нашему 4в1 ESC одним кабелем.
На v5 мы добавили перемычки для выбора источника, пожалуйстаПрочитайте инструкцию и установите перемычкуПеред использованием FC.
Особенности:
STM32 F405 MCU, работает с прошивкой Betaflight 3,0
SBUS/PPM вход (Pinheaders)
Выход 6 ШИМ (1-4Pinheaders и Sh1.0 Plug, 5-6 as Pinheaders)
Только 36x36 мм, крепежные отверстия 30,5x30,5 мм
Они могут быть высланы. Баро BMP280
SPI Сенсор MPU6000
Флэш-память
Посылка, они могут быть высланы.:
1x FC



Характеристики
- Предназначение
- Транспортные средства и Игрушки Дистанционного уПлита
- Материал
- Комбинированный материал
- Характеристики
- Сборка
- Расходный материал для инструментов
- Тип сборки
- Тип транспорта
- Вертолеты
- Номер модели
- FLC042
- Технические характеристики
- Значение 2
- Бренд
- leaco
- Детали дистанционного управления и комплектующие
- flight control
- Детали для тюнинга и запчасти
- flight control
- Периферийные устройства для дистанционного управления
- flight control
Сопутствующие товары


